New Hobbywing Motor Speed Controller Brushless ESC 60A For 1/10 RC Car Truck #2

Всем, кому интересна тема RC-хобби — прошу под cut.
Акт первый
Вот уже несколько месяцев я занимаюсь постройкой дрифт машины. Постройка началась с покупки KIT’а TEH-R31, обзор которого будет после окончательного доведения до ума и боевых испытаний. Помимо хорошего шасси мне потребовались двигатель и регулятор скорости — ESC. Конечно же, коллекторные варианты я не рассматривал.
Поскольку у меня уже был положительный опыт заказа RC запчастей с BIC’а, то я давно приглядывался этому ESC. И вот его час настал.
Порадовавшись довольно быстрой доставке, я получил посылку, но…

Да-да, это совершенно не то, что я ожидал, и совсем не то, что я заказывал. Конечно же, это самый настоящий регулятор для бесколлекторных двигателей, но он совершенно не подходит для авто-моделей.
Поимев трехдневнюю переписку с саппортом BIC’а, мне пришлось оставить у них кровные $10 за ненужный мне товар. Надо сказать, что данный регулятор полностью рабочий. Под нагрузкой мне его проверить не на чем, но 13T двигатель крутит (вхолостую, конечно), BEC выдает 4.2В.
Акт второй
Я решил идти до конца. Сделал повторный заказ, сопроводив его сообщением в саппорт, что мол повторения такой ситуации мне бы крайне не хотелось. Еще три недели томительного ожидания увенчались успехом.

Никаких инструкций, фирменных наклеек, коробок к нему не прилагалось.

В отличии от оригинала, который весь покрыт фирменными наклейками, включая куллер, на моем нет ни ничего, чтобы могло указывать на производителя.
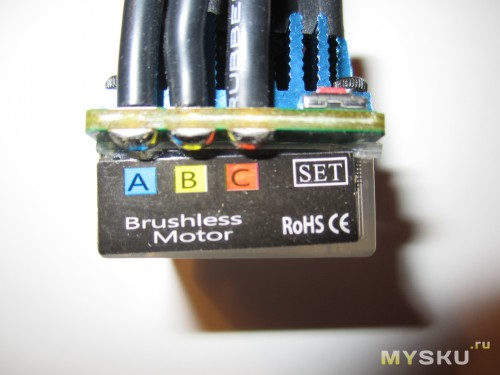

Уже распаянные разъемы двигателя типа банан диаметром 3.4 мм. Если вы захотите поменять родной регулятор HSP (тоже Hobbywing, кстати), то эти разъемы не подойдут, придется перепаивать.

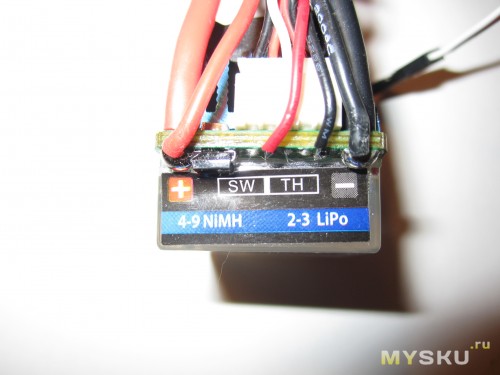
Тамиевский разъем для аккумулятора, также редкость для аккумуляторов из китайшопов — был перепаян на привычный.
BEC, выключатель, разъем ресивера.

Акт третий
Тестовый запуск и предварительная обкатка, в целом, прошли хорошо. Пациент вел себя уверено, не перегревался, и вообще, я остался доволен.
Не обошлось и без эксцессов. Кулер вел себя крайне неадекватно, а именно, при определенных углах наклона начинал крутиться медленнее. Капля силиконовой смазки, похоже, решила эту проблему.
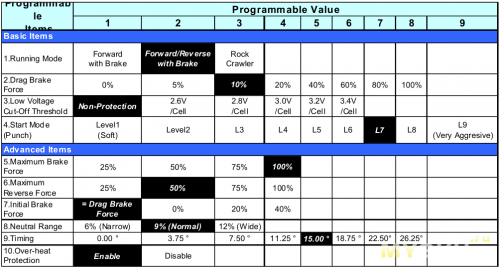
Ниже карта программирования именно регулятора. Очень важно, на данном ESC по-умолчанию был отключено «выключение при низком заряде аккумуляторов». Видимо в новых версиях это уже исправлено, т.к. на официальном сайте, значение по-умолчанию уже стоит 3V.
Насколько этот регулятор надежен — покажет время, но отрицательных отзывов на тематических ресурсах я не нашел. К покупке однозначно рекомендую. За эти деньги найти реальную альтернативу данному ESC весьма сложно.
Если обзор оказался Вам полезен, и Вы планируете приобрести данный товар, то можете указать при регистрации в поле
Как выбрать регулятор скорости для гоночного квадрокоптера

В этой статье мы расскажем, что такое регуляторы скорости (ESC), покажем по каким критериям нужно их выбирать. Будет подробное описание всего что касается регуляторов для гоночных дронов, это должно помочь новичкам влиться в наше сообщество.
ESC значит Electronic Speed Controller — регулятор хода или скорости. Как видно из названия — они нужны для регулировки скорости вращения моторов (например, в гоночных дронах). ESC получает сигнал (уровень газа) от полетного контроллера и управляют бесколлекторным мотором, меняя его скорость вращения за счет управления мощностью. Качественные регуляторы позволят избежать множества проблем и дадут полностью насладиться полетом.
Я собрал характеристики всех регуляторов в одной таблице, так что их легко и просто сравнить между собой.
Содержание
Максимальный ток — Амперы
Первая вещь, на которую нужно обратить внимание при выборе регулятора — это максимальный ток, он измеряется в амперах. Моторы потребляют энергию при вращении, если им нужен ток больше, чем может выдать регулятор, то регулятор начнет греться и в итоге откажет. Это катастрофа, и она может даже привести к полному сгоранию регулятора, в прямом смысле этого слова! Есть три вещи, которые влияют на потребляемый ток и могут перегрузить регуляторы:
- Увеличение KV моторов
- Увеличение размера мотора (диаметр и высота статора)
- Более тяжелые пропеллеры (диаметр или шаг).
Есть два значения максимального тока: максимальный продолжительный ток и пиковый ток. Максимальный продолжительный ток (Continuous current) — это ток через мотор, который может выдавать регулятор скорости продолжительное время без вреда для себя. Даже в гонках вы не будете использовать максимальный газ продолжительное время, а регуляторы обычно способны выдерживать гораздо больший ток в течение короткого времени (порядка 10 секунд), это и есть пиковый макс. ток (burst current rating).
Некоторые новички ошибочно считают это значение током, который выдает регулятор на моторы: на самом деле всё наоборот. Это моторы определяют потребляемый ток, поэтому рейтинг регуляторов должен быть такой же, как у моторов (или выше). Но использовать очень мощные и большие регуляторы нет никакого смысла, например, если вы замените 20А регулятор 40-амперным, то коптер будет хуже летать из-за увеличившегося веса.
Выясняем потребляемый ток
При помощи стенда для измерения тяги и ваттметра можно самостоятельно выяснить потребляемый ток. Ну или просто поискать результаты тестов для вашей винтомоторной группы в онлайне. Некоторые производители моторов указывают такие вещи в описании.
Например, если вы используете FPVModel 2206 (англ.) с винтом 5030 и аккумулятором 4S Lipo, то он будет потреблять 10 А при 100% газе, в этом случае регулятора на 12 А будет достаточно. Но, если вы планируете использовать винты 6045 с этим же мотором, максимальный ток может достигать 20 А, в этом случае безопаснее использовать регулятор на 20А.
Не страшно если вы выберите регулятор с небольшим запасом, но не нужно сходить с ума из-за этого. Вы можете использовать регулятор на 30 А или даже на 40 А, там, где требуется всего 20. Такая конфигурация будет работать, но это перебор, и вы просто увеличите вес и стоимость коптера (более мощные регуляторы дороже и весят больше).
Тяга и потребляемый ток в тестах
Имейте в виду, тесты тяги в статике, которые можно найти в онлайне, обычно показывают бОльшие значения, чем в реальных полетах (ток и тяга).
Во-первых, полетный контроллер всегда оставляет небольшой запас для стабилизации коптера, поэтому вы никогда не получите тягу 100% в реальном полете. Во-вторых, в полете моторам легче, т.к. они уже двигаются в воздухе, поэтому потребляемый ток ниже.
Чтобы проверить эту теорию я настроил OSD (экранное меню), которое показывает общий потребляемый ток во время полета. В моем случае это были моторы DYS Storm 2207 2500KV и пропеллеры DAL Cyclones 5045×3. В тестах тяги эти моторы потребляли 30А при 100% газе. Однако во время полета максимальный ток был около 22-25 ампер.
К тому же стили полета у всех разные, возможно вы не часто летаете на 100% тяге, в этом случае максимальный ток может быть ниже.
Плохие аккумуляторы
Ещё одна вещь, о которой стоит задуматься — какой ток может выдать ваш аккумулятор. Большинству 5″ коптеров хватит регуляторов на 20 А, т.к. четырехбаночные аккумуляторы емкостью 1300 — 1500 мА*ч просто не выдают бОльшую мощность продолжительное время, т.е. их не хватит чтобы спалить 20А регуляторы (при условии что они действительно рассчитаны на 20 ампер, и это не маркетинговый ход).
Регулей на 25 — 30 ампер достаточно в большинстве случаев. Даже если у вас высококачественный аккумулятор ёмкостью 1300 — 1600 мА*ч, то регулятор на 35 А всё равно перебор, хотя хуже не сделает и ничего не спалит.
Я выяснил, что большинство аккумуляторов 4S емкостью около 1500 мА*ч дают ток не больше 80 ампер.
Например, у вас винтомоторная группа, которая может потреблять до 120 ампер. Да, она будет потреблять такой ток, но обычно не более пары секунд. Из-за того, что аккумулятор не сможет выдать такой ток, его напряжение очень сильно просядет и ток станет значительно меньше.
Использование регуляторов значительно более мощных, чем необходимо
При использовании регуляторов с большим запасом по току вы получаете дополнительный вес, увеличенный размер и, возможно, большую цену. Достоинство такого подхода — меньше шанс их перегреть, а эффективность работы регулей немного выше.
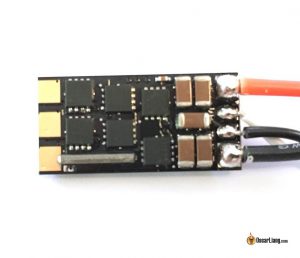
На платах стоят «ключи» (силовые транзисторы или FET), которые и выполняют всю работу по управлению током. Если у вас более крупные и жирные ключи, рассчитанные на большой ток, то они будут греться меньше, чем мелкие ключи. Следовательно они могут быть немного более энергоэффективными, при этом оба варианта будут работать.
Прошивка
SimonK и BLHeli
Две самые старые прошивки для регуляторов мультикоптеров — SimonK и BLHeli. Давным-давно регуляторы поставлялись с примитивными прошивками, написанными производителями, так что моделистам приходилось ставить сторонние прошивки, например SimonK или BLHeli. Потихоньку эти прошивки стали стандартными для большинства регуляторов, и в настоящее время почти все регуляторы идут с уже предустановленными BLHeli или SimonK.
Большинство пользователей выбирает BLHeli, потому что эта прошивка имеет очень простой интерфейс и богатый функционал. Более подробно про преимущества BLHeli и SimonK читайте тут (англ). В любом случае я считаю, что SimonK уже устарела, т.к. не обновляется, рекомендую использовать BLHeli.
BLHeli_S
Это второе поколение прошивки BLHeli, специально разработанное для регуляторов с аппаратным ШИМ (PWM). Имеет более простой интерфейс. Подходит для некоторых регуляторов типа: Aikon SEFM 30A, DYS XS и т.д.
BLHeli_32
Прошивка BLHeli_32 — это третье и самое свежее поколение BLHeli. Прошивка разработана специально для 32-битных микроконтроллеров, исходный код закрыт. Более мощные процессоры дают более плавное, точное и надежное управление моторами.
Процессор
Большинство современных регуляторов используют микроконтроллеры фирм Atmel, Silabs или ARM Cortex. Разные микроконтроллеры имеют различную производительность и работают под управлением разных прошивок.
- на Atmel (8 бит) можно использовать как SimonK так и BLHeli
- на SiLabs (8 бит) можно использовать только BLHeli или BLHeli_S
- Atmel ARM Cortex 32-bit, STM32 (конкретнее: STM32 F0) — BLHeli_32
Восьмибитные регуляторы на ATMEL раньше были очень популярны, потом, благодаря больше производительности, доминировать начали микроконтроллеры от Silabs. В 2016 году появились регуляторы на 32-битных микроконтроллерах.
SILABS F330 и F39X
Регуляторы, основанные на чипах SiLabs можно разделить на группы по сериям микроконтроллеров, 2 основные это F330 и F39X (F390 и F396).
F330 — имеет низкую тактовую частоту, и с ним могут возникнуть проблемы при использовании моторов с большим KV. У F39X нет таких проблем, они также поддерживают протокол Multishot (он в 10 раз быстрее, чем Oneshot125) и Oneshot42. Два наиболее известных регулятора: Littlebee 20A (F330) и DYS XM20A (F39X).
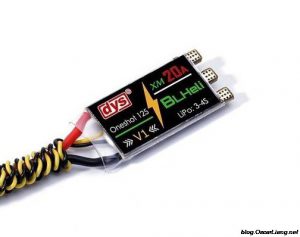
DYS XM20A – F390
Busybee (EFM8BB)
Микроконтроллеры Busybee — это обновление F330 and F39X. Если у вас прошивка BLHeli_S, то скорее всего в регуле стоит чип Busybee:
- BusyBee1 – BB1 (EFM8BB10F8)
- BusyBee2 – BB2 (EFM8BB21F16)
Эти модели используют аппаратный ШИМ (PWM) вместо программной эмуляции, в результате мы получаем более плавную реакцию на изменение газа и есть поддержка протокола D-Shot. Это дешевые, но хорошие регуляторы.
Пример: Aikon SEFM 30A и DYS XS30A.
Aikon SEFM 20A – BusyBee
Производительность 8-битных микроконтроллеров
Если кратко, то в порядке от лучших к худшим:
8 бит и 32 бита
32-битные микроконтроллеры имеют больше вычислительных мощностей, с ними появляются возможности, недоступны 8-битным. Например, «ESC Telemetry», датчики тока, программируемые RGB светодиоды и т.д.
Однако до сих пор в продаже есть куча 8-битных регуляторов т.к. у них имеется весь минимально необходимый функционал типа DShot, RPM filter и т.д. по очень доступной цене. Для множества пилотов этого достаточно.
Протоколы
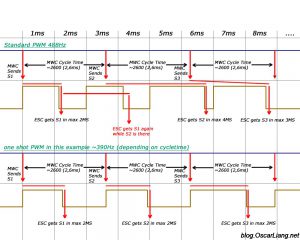
Протоколы, используемые в регуляторах скорости определяют скорость передачи сигнала от полетного контроллера к самому регулятору, а это может оказать заметное влияние на поведение коптера. Оригинальный (самый старый) протокол — PWM или ШИМ, имеет задержку до 2 мс, а один из самых быстрых — Multishot — 5-25 мкс.
Вот список протоколов, используемых в регуляторах коптеров (от старых к новым):
- PWM
- Multishot (DShot150, DShot300, DShot600, DShot1200)
Подробнее читайте в отдельной статье про протоколы. Не каждый регулятор поддерживает все протоколы, перед покупкой убедитесь, что необходимый протокол поддерживается.
Активное торможение и аппаратный ШИМ (Active Braking и Hardware PWM)
Есть несколько фишек регуляторов о которых вы обязательно должны знать:
- или Damped Light или Active Braking — улучшает отзывчивость
- Аппаратный ШИМ (Hardware PWM) — улучшает отзывчивость и плавность, делает ваш квадрик заметно тише и немного более энергоэффективным. Дает немного более точное управление
- Отдельный драйвер затворов полевых транзисторов — дешевые регуляторы используют обычные транзисторы для управления мощными силовыми транзисторами, использование специальных аппаратных драйверов улучшает активное торможение
Размер и вес
Как правило размер и вес регуляторов пропорционален максимально допустимому току.
Регуляторы, разработанные для мини-квадриков имеют достаточно стандартные размеры и вес около 4-6 грамм. Всё сложнее и сложнее сделать регули ещё меньше и легче без ухудшения характеристик. Для гонок обычно стараются сделать коптер как можно более легким, но если вы хотите облегчить коптер, то лучше обратить внимание на что-то ещё, а не на регуляторы.
Мелкие регули быстрее нагреваются, и бывает довольно сложно их охладить, поэтому ставя очень мелкие регуляторы старайтесь подумать об охлаждении.

Напряжение питания
Некоторые регуляторы могут работать даже от 6-баночных аккумуляторов, другие — максимум 4S. Перед покупкой убедитесь, что они совместимы по напряжению. Если подать на регуль слишком большое напряжение, то он просто сгорит, возможно вместе с моторами.
Регуляторы с BEC и без него (Opto ESC)
Некоторые регуляторы включает в себя стабилизатор (BEC), который дает на выходе 5В (это напряжение можно использовать для питания полётного контроллера, приёмника и других компонентов). Есть регуляторы у которых BEC отсутствует, их маркетологи и производители часто называют «Opto», хотя очень часто никакой опторазвязки в них нет.
Оптопара — это оптический элемент, который передает сигнал при помощи света. Он отделяет высоковольтную часть схемы от низковольтной и предотвращает повреждение электроники высоким напряжением, снижает интерференцию сигналов.
Opto регуляторы имеют преимущество: меньший вес, размер и шум (т.к. схема управления мотором изолирована от управляющих схем: от приемника и полетного контроллера).
Однако без BEC на 5 вольт приходится использовать отдельный стабилизатор для питания приёмника и полётного контроллера (заметьте, у таких регуляторов всего 2 контакта на серворазъеме, а не три: есть земля и сигнал, но нет питания — красного провода).

Регулятор с BEC
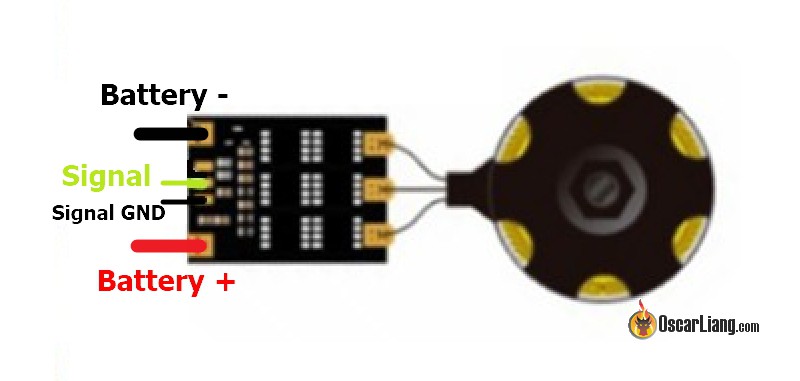
Вопрос всех новичков: подключение регулятора к мотору
Я всё ещё помню, как сам начинал заниматься квадрокоптерами, начал я с подключения мотора к регулятору и думал: как же соединить 3 провода? До сих пор я очень часто получаю этот вопрос от новичков.
Не беспокойтесь о порядке подключения проводов, просто подсоедините все три провода от регулятора к проводам мотора, в любом порядке, как вам удобнее. Если мотор будет вращаться не в ту сторону, просто поменяйте два любых провода. Кроме того, направление вращения можно изменить в настройках через BLHeliSuite (если вы используете прошивку BLHeli). В случае регуляторов KISS, нужно просто закоротить два контакта, специально предназначенных для этой цели.
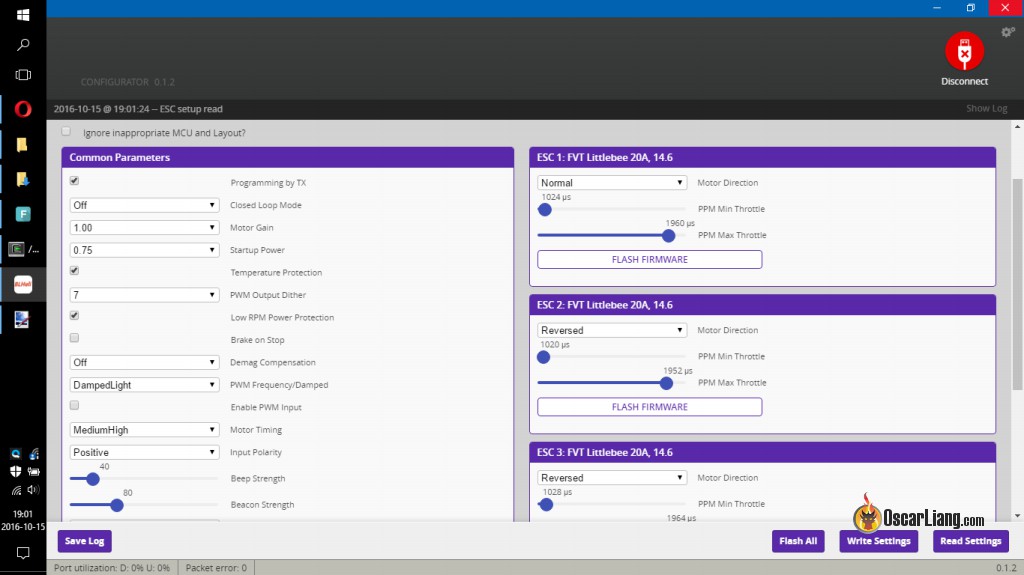
BLHeli ESC Configurator
Как известно, BLHeliSuite работает только под Windows, но для пользователей других операционных систем есть хорошая новость. Существует расширение для Chrome под названием BLHeli Configurator, его можно использовать для прошивки и настройки регуляторов. Расширение работает под любой ОС, где есть Хром.
Подходит для BLHeli and BLHeli_S, не подходит для BLHeli_32.
Регуляторы, встроенные в моторы
Да. есть и такие устройства, например, ZTW Black Widow. С одной стороны, это удобно и экономится место, но на самом деле довольно спорное решение.
При ремонте или апгрейде приходится менять сразу пару устройств (регуль+мотор), что в долгосрочной перспективе заметно дороже.
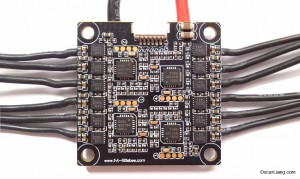
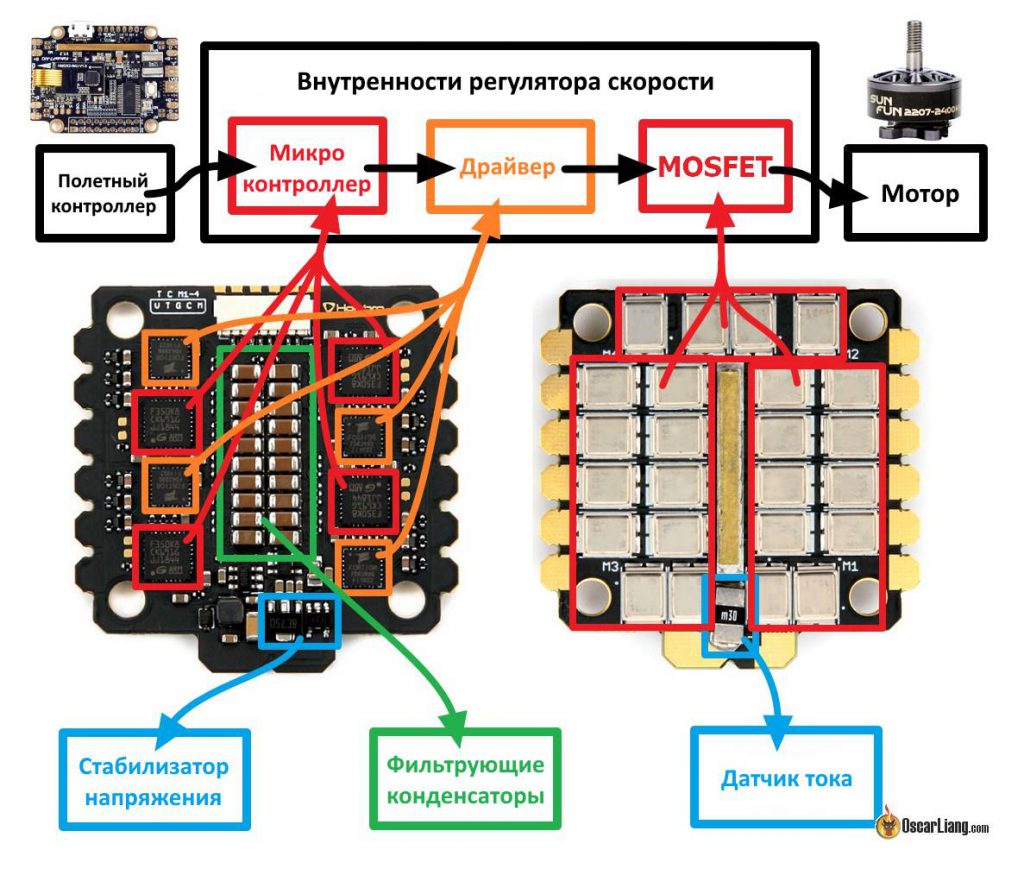
Регуляторы «4-в-1»
Еще один удобный вариант — регулятор 4 в 1, по сути, это 4 отдельных регулятора скорости расположенных на одной плате, размером как полетный контроллер или PDB (плата распределения питания). Такие регуляторы и полётник можно собрать в стек, что упрощает разводку проводов. Однако повреждение 1 регулятора ведет к замене целой платы. Компромисс между риском и удобством.
В качестве компромисса некоторые производители выпускают отдельные регуляторы, которые можно соединить между собой и получить плату 4-в-1, например Quadrant 4-in-1. Ещё одно преимущество плат 4-в-1 — более правильно распределение веса в коптере, основная масса компонентов оказывается в собранной в одном месте, что дает меньший момент инерции коптера. Благодаря этому увеличивается его отзывчивость.
Регуляторы 4-в-1 обычно ставятся прямо под полетным контроллером, поэтому есть смысл подумать о помехах, которые могут повлиять на летные характеристики и качество видео. Попробуйте их экранировать (англ).
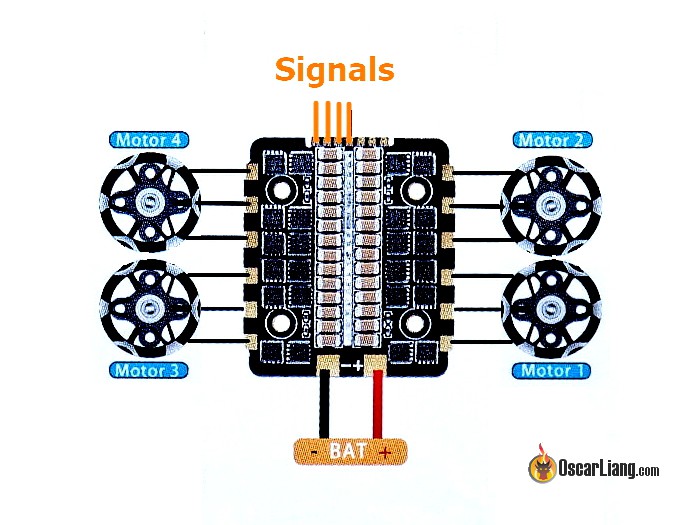
Как подключить
ESC питаются от аккумулятора, а скорость вращения мотора управляется сигналом, обычно идущим от полетного контроллера.
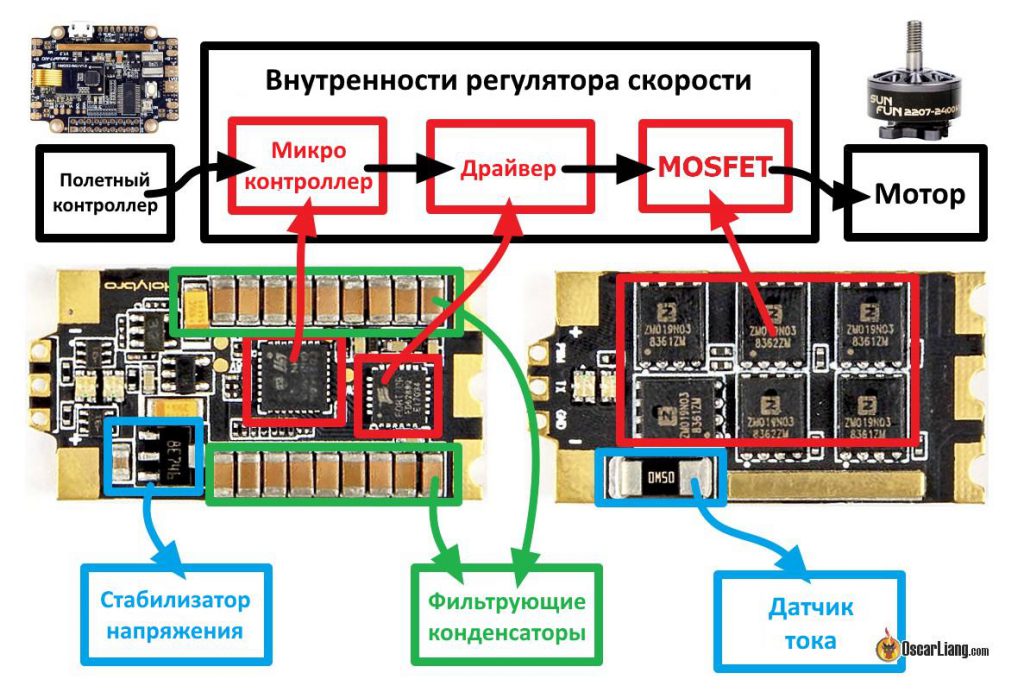
Анатомия
Типичный регулятор скорости состоит вот из этих компонентов:
- Микроконтроллер
- Драйверы ключей
- Силовые транзисторы (ключи, MOSFET)
- LDO (стабилизатор питания микроконтроллера)
- Куча конденсаторов (фильтры)
- Опционально: датчик тока
- Опционально: светодиоды
Регуляторы 4-в-1 — это, как правило, 4 одинаковые схемы на одной плате.
LDO (стабилизатор напряжения)
Этот стабилизатор снижает напряжение аккумулятора, служит для питания микроконтроллера и других компонентов регулятора (это не BEC, прим. перев).
Микроконтроллер
Это мозг регулятора, работает под управлением прошивки, например BLHeli.
Драйверы ключей (gate drivers)
Нужны для управления мощными ключевыми транзисторами, и оказывают заметное влияние на характеристики. Подключаются к затвору (gate) мосфетов, поэтому по английский и называются gate drivers.
В старых и дешевых регуляторах вместо драйверов использовались простые транзисторы. Поэтому их характеристики и возможности по торможению были хуже.
Вместо того, чтобы использовать три отдельных драйвера для трех фаз мотора, в современных регуляторах с BLHeli_32 используется чип FD6288. Это сразу три драйвера в одном чипе.
Силовые транзисторы (MOSFET)
Или ключи, они как выключатели, только включаются и выключаются тысячи раз в секунду, собственно, это и есть управление мотором.
Бренды
Производители популярных и качественных регуляторов скорости для гоночных дронов (по алфавиту):
- Aikon
- Armattan
- Castle
- DYS
- EMAX
- Favourite
- FPVModel
- Gemfan
- KISS
- Lumenier
- Racerstar
- Rotorgeek
- Sunrise
- TBS
- T-Motor
- Turnigy
Извиняюсь, если пропустил кого-то, дополните список в комментариях.
Регуляторы и тяга
При использовании некоторых регуляторов возрастает тяга моторов (при той же конфигурации: мотор, пропеллер, аккумулятор). Разница может достигать 20%. Однако это не значит, что регулятор качественный, есть и другие критерии: качество сборки, долговечность, диапазон напряжений питания, плавность управления, уровень создаваемых помех и т.д. Ещё влияет стиль полета.
Лично я не заморачиваюсь с этим, т.к. большинство современных регуляторов от известных брендов работают более-менее одинаково.
Автоматический тайминг или ручной?
Есть два подхода к таймингу управления двигателями: автоматический (auto timing) и ручной (fixed timing), первый используется в регуляторах KISS, второй — в BLHeli. Оба подхода влияют на характеристики и надежность работы, подробнее объясняется тут (англ).
Загрузчик
Раньше, когда было много разных прошивок, загрузчик был важен при прошивке. Загрузчик — это очень маленькая программа, которую нужно прошить в регулятор; она дает доступ к этому регулятору и позволяет менять/обновлять/настраивать прошивку.
В настоящее время, не стоит даже задумываться об этом, т.к. все новые регуляторы идут с прошивкой BLHeli и с загрузчиком BLHeli. Если вам любопытно, то вот ещё немного информации о загрузчиках:
Без загрузчика можно обновлять прошивку и менять настройки регуляторы только напрямую подключившись к чипу-микроконтроллеру (англ.) или подпаявшись к специальным контактным площадкам на плате (если они, конечно, есть). При прошивке этим способом, можно заодно прошить и загрузчик.
У прошивок SimonK и BLHeli имеются свои загрузчики. Загрузчик от BLHeli имеет более широкий функционал, делая прошивку и настройку заметно проще. Раньше мы могли прошивать только через сигнальный провод, используя интерфейс 1-wire (англ). Сейчас есть более удобный, «сквозной» (passthrouh) метод, при этом полетный контроллер выступает в роли программатора.
Какие регуляторы я рекомендую?
История изменений
- Июль 2016 — первая версия статьи
- Август 2017 — добавлена информация про BLHeli_32 и 32-битные процессоры, спасибо Тому за правки
- Октябрь 2019 — добавлена анатомия регуляторов и схемы подключения
- Январь 2020 — обновление информации
Как выбрать регулятор скорости для гоночного квадрокоптера : 4 комментария
А где отличия в ключах — мосфетных и других.
Что конкретно интересует? Как устроены мосфеты?
Ваша статья очень хорошая!
Но хотелось бы больше инфы по … каждый новичок рано или поздно задается вопросом программирования, как это сделать? виды устройств? как подключить к компу? есть ли сразу готовые к установке?
Заранее спасибо!
Хоббивинг стекинг регулятор тока для бк двигателя
Что такое регулятор (контроллер) скорости и для чего он нужен можно почерпнуть из предыдущей статьи про основные элементы радиоуправляемых моделей. А сегодня речь пойдет о типичных настройках регулей и способах их изменения.
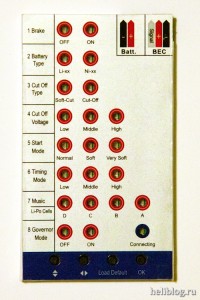
Настройки регуляторов скорости
- Brake (тормоз) . Варианты — включен, выключен, иногда также есть «плавный тормоз». При включенном тормозе при убирании газа в ноль регулятор будет принудительно останавливать двигатель, при выключенном — двигатель некоторое время будет продолжать вращаться по инерции.
- Batterry type (тип батареи). Варианты — Li-xx, Ni-xx, иногда Li-Fe. Выбор типа аккумулятора между литиевыми (литий-ионные, литий-полимерные) и никелевыми (никель-металлгидридные, никель-кадмиевые). Данный параметр влияет на пороговые напряжения отсечки.
- Cut off type (тип отсечки). Варианты — Soft-cut, Cutt-off, иногда также Middle-cut. Тип срабатывания отсечки двигателя при падении напряжения питания — жесткая, когда двигатель просто отрубается сразу, либо мягкая, когда он постепенно снижает обороты.
- Cut off voltage (напряжение отсечки). Варианты — Low, Middle, High, либо напрямую напряжение отсечки. Задает порог напряжения при котором происходит отсечка. На этот параметр также влияет выставленный тип аккумуляторов — напряжения отсчки для никелевых аккумуляторов ниже, чем для литиевых. Высокий порог отсечки наименее опасен для аккумулятора, но опасней всего для модели.
- Start mode (режим старта). Варианты — Normal, Soft, Very soft. Режим старта мотора. В нормальном режиме мотор сразу раскручивается на полную мощность, при мягком старте — вносится искусственная задержка. Нормальный режим в основном используется для моторов с пропеллерами, мягкий режим — для моторов вертолетов, чтобы не угробить зубцы на пластиковой шестерне.
Это основные настройки. У некоторых специфичных моделей (особенно дорогих), могут быть и другие возможности настроек, которые обычно указываются в инструкции на регулятор.
Способы программирования регуляторов скорости
Вариантов программирования ESC несколько:
- Программирование ручкой газа. Этот вариант не требует никаких дополнительных устройств, но он кошмарно неудобен. Смысл в том, что регулятор присоединяется к приемнику, включается при задранном на 100% газе, при этом он переходит в режим программирования и начинает издавать писки. По количеству писков и по паузам между ними определяется какой параметр сейчас изменяется, а движением ручки газа производятся действия по изменению настроек. В общем, это сродни программированию некоторых древних Российских мини-АТС, которые также программировались по телефону на основе гудков и писков. Честно говоря этот способ настолько заморочен и неудобен, что я даже не стал в нем разбираться, потому что есть способ №2.
- Программирование контроллеров с помощью карты программирования. Это самый простой и наглядный способ, но для него понадобится приобрести специальное устройство — карту программирования. Стоит она недорого: 5-15$. Беда в том, что для разных производителей регуляторов нужны свои карты программирования. Более того, для различных линеек регуляторов от одного производителя порой нужны различные карты программирования. Для хоббикинговских регуляторов нужны соответственно хоббикинговские карты программирования, они же поддерживают регуляторы фирм H-Wing, OEMRC и Turnigy Speed. Для регуляторов фирмы Hobbywing нужна соответствующая карта, она же программирует RCtimer’овские регуляторы. Как правило, все карты программирования имеют индикаторы для показа текущих установок, несколько кнопок для перемещения между настройками и изменения их, а также кнопку для сохранения настроек. Поэтому процесс программирования в данном случае значительно более простой и удобный, чем с помощью ручки газа, поэтому задумайтесь о приобретении карты программирования, если собираетесь настраивать свои ESC.
- Третий способ экзотический — он доступен как правило только для дорогих регуляторов. Это программирование с помощью адаптера USB, или через ИК пульт. В этом случае вместе с устройством идет специальный адаптер (либо он приобретается отдельно), а настройки изменяются с помощью пульта, либо с помощью программы на компьютере. Некоторые регуляторы с программированием через USB имеют весьма продвинутые настройки, например, возможность задать кривую газа непосредственно для регулятора, или загрузить мелодию для проигрывания при старте.
Программирование регулятора с помощью карты программирования
Покажу как программируется регулятор на примере карты для регуляторов Hobbywing, которая также подходит и к регуляторам RCtimer. Для регуляторов со встроенным стабилизатором достаточно просто подключить управляющий шлейф регулятора к разъему «BEC» на карте программирования, затем подключить к регулятору аккумулятор. Через несколько секунд на карте загораются лампочки и показывают текущие настройки.
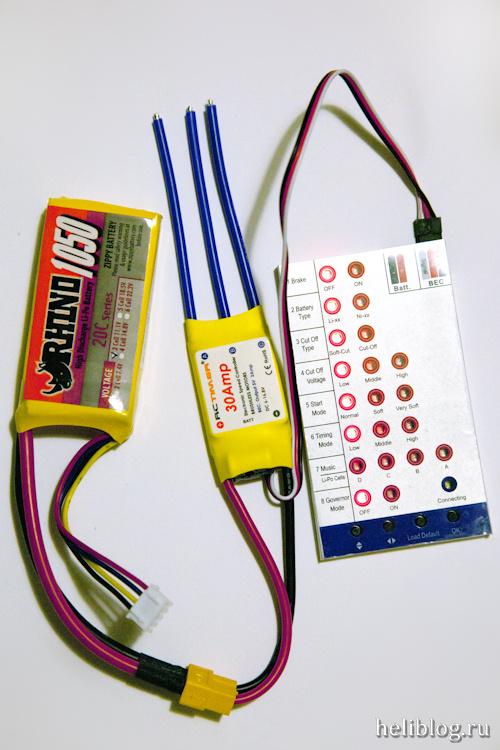
Программирование ESC со встроенным BEC
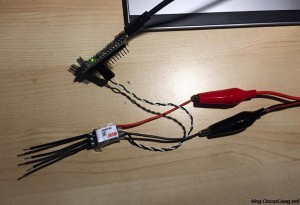
При программировании регуляторов без стабилизатора питания, или с отключенным проводом питания, необходимо подать на карту программирования питание со стороны. Это можно сделать, например, с приемника, или еще откуда-нибудь. Напряжение питания: 5-6 Вольт. Мне показалось удобней всего использовать для этих целей кассету под АА аккумуляторы с разъемом под приемник, вот эту. В остальном процесс ничем не отличается.

Программирование ESC без стабилизатора питания
Ну вот, про программирование ESC написал, теперь можно со спокойной совестью программировать свои 6 регуляторов для квадрика.
Источник https://mysku.club/blog/china-stores/10267.html
Источник https://blog.rcdetails.info/kak-vybrat-regulyator-hoda-dlya-gonochnogo-kvadrokoptera/
Источник https://heliblog.ru/teoriya/programmirovanie-regulyatorov-skorosti-esc.html





